Unterwasserarchäologie 3D Scan eines versunkenen Schiffs im Bodensee
Im bis zu 251 Meter tiefen Bodensee finden sich hunderte Überreste von Wasserfahrzeugen oder anderen Wracks wie Flugzeugen, bei denen es sich in vielen Fällen um Bodendenkmale bzw. Technikdenkmale handelt oder handeln kann. Die Ursachen für den Untergang der Schiffe waren vielfältig und sind im Einzelnen bislang kaum geklärt: Unwetter, Brände, Strandungen, Kollisionen, Überladung und Überalterung des Fahrzeugs sowie kriegerische Auseinandersetzungen oder gezielte Selbstversenkung. Bei den meisten Schiffsfunden ist zudem der Denkmalpflege der aktuelle Zustand nicht bekannt.
Um dieses spannende Gebiet der Unterwasserarchäologie genauer zu beleuchten gibt es Spezialisten wie Dr. Florian Huber, der sich als Unterwasserarchäologe einen Namen gemacht hat. Wir durften ihm im letzten Jahr bei einem Projekt über die Schulter schauen und bei der Berechnung mit Metashape helfen. Heute möchte ich etwas detaillierter darüber berichten. Wenn Ihr mehr Interesse an der Thematik habt, schreibt uns einfach und wir können eventuell gemeinsam ein Fach-Webinar organisieren oder ihr schaut mal bei Dr. Hubers Unterwasser-Workshops vorbei.
Herausforderungen der Archäologie bei 3D Scans
Im Gegensatz zu den üblichen 3D Scans die wir so bearbeiten sind archäologische Projekte immer eine besondere Herausforderung. Das spannende ist, dass es
- häufig sehr begrenzte Ausgrabungszeiten gibt
- die gefundenen Objekte nicht einfach mitgenommen werden dürfen
- häufig arbeiten mehrere, unterschiedlichen und internationalen Teams an der gleichen Ausgrabungsstätte
- Fundstücke sind daher auch oft auch in der ganzen Welt verteilt
Das Ziel einer jeder archäologischen Aufarbeitung ist es, alles möglichst sorgfältig zu dokumentieren und zu archivieren, sowie für die weitere Forschung zu rekonstruieren.
Herausforderungen des 3D Scans unter Wasser
Bei der Unterwasserarchäologie kommt bei dem Punkt „begrenzte Ausgrabungszeit“ noch hinzu, dass
- ein Tauchgang sehr anstrengend,
- logistisch herausfordernd
- sehr kostenintensiv
- und zeitlich noch enger limitiert ist, da natürlich irgendwann die Luft ausgeht.
- Obendrein sind die Lichtverhältnisse immer schlechter als an der Oberfläche
- Und die Verschmutzung und Schwebeteilchen kaum planbar
Es gibt also zahlreiche Fehlerquellen, die man umgehen muss.
Die Bedeutung von Photogrammetrie in der (Unterwasser)-Archäologie
All diese Herausforderungen sprechen dafür, dass das „3D Scanning“ vor Ort mit möglichst einfachen Mitteln immer mehr Bedeutung in der Archäologie findet. Da nicht überall bspw. teure Laserscan-Systeme für 3D Scans genutzt werden können, oder geeignet sind, sind für Archäologen die SfM-Modelle (Structure from Motion) der Photogrammetrie mittlerweile sehr wichtig. So kann bspw. in kurzer Zeit ein ganzes Schiff visualisiert werden. Das hilft
- zum Einen bei der rein fachlichen Dokumentation, der nachträglichen Vermessung, Nachbearbeitung und Rekonstruktion,
- zum Anderen kann der Öffentlichkeit gezeigt werden, welche historischen Schätze in unseren Seen, Flüssen und Meeren liegen.
Um ein SfM-Modell zu errechnen braucht es nur eine (DSLR)-Kamera oder Videokamera und diese sind ohnehin immer vor Ort. Umso wichtiger ist es also zu verstehen, was man photogrammetrisch daraus machen kann und wie man diese Technik effizient nutzt. Hier helfen wir gern mit Soft- und Hardware, aber natürlich auch mit Beratung weiter.
Ausflug in die Grundlagen der Photogrammetrie
In aller Kürze:
Bei den Grundlagen der Photogrammetrie geht es darum, wenn ein Punkt eines Objektes
- aus mindestens 3 verschiedenen Winkeln
- eindeutig erkennbar ist
Dann kann man diesen im 3-dimensionalen Raum anordnen. Und tausende solcher Punkte, ergeben eine Punktwolke, welche dann in ein 3D Model umgewandelt werden kann.
Wir brauchen also möglichst scharfe Fotos!
Bei unbeweglichen, handlichen Objekten ist es daher relativ einfach diese zu erfassen. Man stellt das Licht, die Beleuchtungszeit und Blende so ein, dass durchweg ein scharfes Bild entsteht und bewegt sich so um das Objekt. Das funktioniert solange die Objekte geeignete Materialeigenschaften mit sich bringen, um eindeutig erkennbar zu sein. (bspw. Transparente, spiegelnde oder sehr dünne Objekte entsprechen nicht diesen Voraussetzungen)
Insgesamt ergeben sich verschiedene Fehlerquellen bei der Photogrammetrie, die man immer vorab bedenken sollte:
- ungeeignete Material/Objekteigenschaften
- ungeeignete Umgebung
- schlechte Aufnahmen/Technik
- zu wenig Bilder
Gerade bei sehr wenig Zeit, gilt es also vorab genau zu überlegen und Planungen zu tätigen, um die Aufnahmesituation zu optimieren und schwierigen Bedingungen zu begegnen.
Wenn du mehr über die Grundlagen der Photogrammetrie, die Herausforderungen und verschiedene Lösungstechniken erfahren wollt, dann empfehle ich dir unser Videotraining zu den Grundlagen der Photogrammetrie und Metashape. Hier lernst du das grundlegende Verständnis was jeden 3D Scan verbessern wird!
Vorüberlegungen zur Unterwasseraufnahme für den 3D Scan
Soviel zur Theorie, bei Unterwasseraufnahmen gibt es aber die beschriebenen Probleme und damit andere Lösungsansätze.
- Das Objekt bewegt sich zwar nicht, aber ggf. das Wasser und damit Schwebeteilchen im Bild
- Zudem kommt bei unserem Beispiel in 32m Tiefe kaum natürliches Licht zum Objekt
- die eigene Lichtquelle verläuft sich auch schnell im Hintergrund
- Man kann also nur einen gewissen Nahbereich scharf aufnehmen und benötig deutlich mehr Bilder und Überlappungen
- Zudem gibt es das beschriebene Zeitproblem, um genügend Fotos in hoher Qualität zu produzieren.
- Auch die Blitzlichter würden bereits nach kurzer Zeit ausfallen, was mehrere Tauchgänge und damit Kosten erfordern würde.
Um den geschilderten Herausforderungen der Unterwasserarchäologie zu begegnen ist damit die klare Empfehlung der Einsatz einer hochwertigen Videokamera bei dem Tauchgang.
Betrachten wir nun die potentiellen Fehlerquellen im einzelnen:
Materialeigenschafen des Objekts – Das Schiffswrack

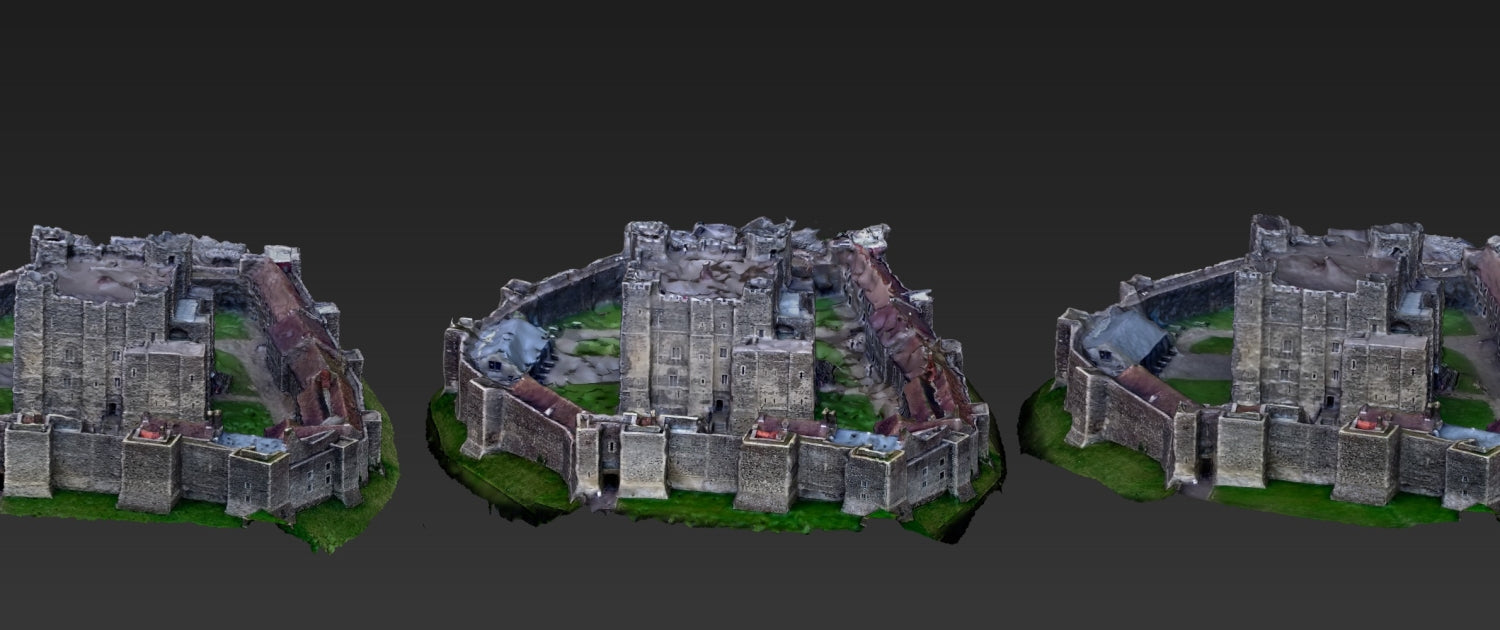
Das zu scannende Wrack liegt in 32m Tiefe im Bodensee. Es ist etwa 15 Meter lang und maximal 4,72 m breit. Nach der 3D Berechnung in Metashape kann es problemlos und in aller Ruhe vermessen werden, da vor Ort Referenz-Maßstäbe ausgelegt wurden. Es besteht komplett aus Holz, hatte Steinkohle geladen und dürfte sehr wahrscheinlich aus der Mitte des 19. Jahrhunderts stammen. Große Teile des Wracks sind mit feinem Sediment bedeckt und mit Quaggamuscheln bewachsen. Da das Wrack in einem super Zustand ist, kann man es aufgrund von Schiffsform, Maßen und anderen signifikanten Merkmalen eindeutig als Segner (Bodensee-Lastensegler) ausweisen. Wenn du mehr dazu erfahren möchtest, findest du hier die genauen Schiffsdetails.
Umgebungsbedingungen der Unterwasseraufnahmen beim 3D-Scan

Da es in 32m Tiefe kaum natürliches Licht gibt und die Wassertemperatur nur ca. 6 Grad beträgt sind die Tauchgänge sehr schwer. Umso wichtiger ist es die wenige Tauchzeit optimal zu nutzen und vorab einen Plan zu haben, was gemacht werden soll. Das Wrack wurde von einem Videotaucher mit einem zusätzlichen Beleuchtungstaucher dokumentiert, um aus den 4K-Videosequenzen ein SfM-Modell (Structure from Motion) zu erstellen. So konnte das Wrack an zwei Tagen, in vier Tauchgängen und einer Gesamtarbeitszeit von 120 Minuten dokumentiert werden.
Das Team bestand aus 4 Forschungstauchern, wobei immer 2 tauchen und 2 oben auf dem Arbeitsboot bleiben. Jeder Tauchgang wurde mit einem geschlossenen Kreislaufgerät sowie Doppel-12-Liter Flaschen und einer seitlich mitgeführten Stage mit 11 Litern absolviert. Dabei wurde eine sichere Grundzeit von 30 Minuten am Wrack mit einer anschließenden Dekompressionszeit von etwa 10 Minuten in 6 Metern erreicht.
Wenn Ihr mehr Interesse daran habt, Herr Dr. Huber bietet spezielle Unterwasserarchäologie-Workshops für Sporttaucher aller Verbände in Theorie und Praxis an.



Aufnahmetechnik für die Unterwasseraufnahmen beim 3D-Scan

- Vollformat-Kamera für beste Qualität auch bei Video-Aufnahmen (4K)
- Canon 1DX Mark III - Seacam Unterwassergehäuse
- bis zu 20.000 Lumen starke Videolampen vom Typ Keldan
- Ein zusätzlicher Beleuchtungstaucher war mit einem Lampen-Rigg ausgestattet, um die Fundstelle optimal auszuleuchten.
- Die Videosequenzen für das Erstellen der SfM-Modelle wurden in 4K und 25P aufgenommen.
Kamera-Einstellungen:
- Belichtung 1/160
- Brennweite 24 mm
- Blende 8 Hohe
- Iso (1.000 – 3.200)
Da es in einer Tiefe von 32m schon sehr dämmrig ist (siehe Fotos), wurde viel Licht an der Kamera plus zusätzlicher Beleuchtungstaucher genutzt. Dabei muss man neben der Bedienung der Kamera auch das perfekte Tarieren im Auge behalten, damit man am Wrack nichts aufwirbelt und sich so die Sicht kaputt macht. Außerdem muss man drauf achten, dass man alle Teile des Wracks abfilmt, am besten auch aus mehreren Richtungen.
Berechnung des 3D Models mit Metashape Pro
Videoimport in Metashape Pro

Die Videos wurden wie beschrieben in 4K aufgenommen. Bei dem Schiff bzw. den finalen Aufnahmen wurden recht gute Lichtverhältnisse hergestellt und es gab kaum Schwebeteilchen, die störend hätten wirken können. Die Aufnahmen sind glasklar. Daher wurden zur Optimierung der Rechenzeit die Videos auf HD komprimiert. Das hat hier noch problemlos ausgereicht, um zu einem tollen Ergebnis zu kommen. Die Berechnung mit 4K wäre nur deutlich länger gewesen, hätte aber kaum entscheidende Verbesserungen am Model gebracht. Daher finde ich es immer wichtig nicht mit „Kanonen auf Spatzen“ zu schießen und die Ressourcen möglichst optimal zu nutzen. [neu]

Im Metashape kann ich nun die einzelnen Aufnahmen importieren und in einzelne Frames teilen. Da die Unterwasseraufnahmen recht langsam schweben, entstehen bei hoher Frame-anzahl einfach deutlich mehr Bilder ohne echten, zusätzlichen Nutzen. Weil ohnehin ein sehr großer Datensatz entstehen würde habe ich hier die Stufe „Mittel“ gewählt. Nun werden daraus die notwendigen Einzelbilder zur Berechnung generiert.[neu]
Vorgehen und Einstellungen in Metashape:
- DATEI > Importieren > Video importieren…
- nun die Videoimporteinstellungen anpassen, in meinem Fall das komplette Video auf Schrittweite “mittel”
Ausrichtung

Nach dem Import aller Videos in jeweils einen Chunk geht der übliche Workflow los. Die einzelnen Film-Sequenzen wurden so erstellt, dass das Video vom Schiff entweder nur von der Seite oder nur von Oben bzw. nur einzelne Details zeigt. Dadurch fehlen hier häufig die photogrammetrischen Grundlagen (1 Punkt aus 3 Winkeln) auf verschiedenen Achsen und damit schlägt die Ausrichtung und Verarbeitung einzelner Chunks teilweise fehl. Da aber alle Informationen vorhanden sind, macht die Einzelberechnung in Chunks hier auch nur wenig Sinn, weshalb ich alle Bilder in einen gemeinsamen Chunk zusammengeführt habe. Bei über 5.500 Kameras/Bildern gibt es nun genügend Punkte die sich auch überlappen.
Vorgehen und Einstellungen in Metashape:
- Um die Rechenzeit zu optimieren wähle ich auf jeden Fall die „Allgemeine Vorauswahl“
- und versuche in der kleineren Einstellung (Mittel) die Ausrichtung zu bewältigen.
- Die “statischen Verknüpfungspunkte ausschließen” kann man hier aktivieren, obwohl es sich ja nicht um ein statisches Objekt auf einem Drehteller handelt. Aber es hilft, um ggf. Schwebeteilchen oder Schmutz bzw. Kratzer auf der Kamera oder dem Gehäuse zu ignorieren.






Überlappungen reduzieren

Nachdem die Kameraausrichtung gut geklappt hat, möchte ich den weiteren Prozess etwas beschleunigen. Um mit weniger Material rechnen zu müssen nutze ich die Funktion „Überlappungen reduzieren“. Dadurch werden Kameras/Bilder dekativiert, die im Grunde das gleiche zeigen. In den Berechnungen kann ich somit mit weniger Kameras arbeiten um die gleiche Anzahl von Punkten zu erreichen.
Vorgehen und Einstellungen in Metashape:
- Über den Menupunkt Werkzeuge > Überlappungen reduzieren…
- Einstellungen individuell wählen (ausprobieren)
Ausrichtung des Objekts
In meinem üblichen Workflow richte ich das Objekt nun nach X-Y-Z Achse aus und bereinige die offensichtlichen Fehler in der Punktwolke. Anschließend erstelle ich die dichte Punktwolke mit den reduzierten Kameras und säubere diese auch von Artefakten.
Wenn du mehr über die Grundlagen der Photogrammetrie, die Herausforderungen und verschiedene Lösungstechniken erfahren wollt, dann empfehle ich dir unser Videotraining zu den Grundlagen der Photogrammetrie und Metashape. Hier lernst du das grundlegende Verständnis was jeden 3D Scan verbessern wird!Videotraining: "Grundlagen der Photogrammetrie und Metashape" kaufen
Details herausarbeiten

Das erste Ergebnis sah auf den ersten Blick schon sehr gut aus, wobei es einige Löcher und Problemstellen gibt. Problematisch bei Objekten sind immer Überschneidungen und „Schatten“. In diesem Fall ist beispielsweise das Ruder von der Innenseite nur wenig Punkte erfasst und entsprechend grob modelliert. Aufgrund der Vorbereitung und Planung hat das Team der Unterwasserarchäologen hier entsprechend Detailaufnahmen vom Ruder und von Heck gemacht, damit hier mehr Datenmaterial zur Verfügung steht und kritische Stellen ein besonderes Augenmerk erhalten.
Diese zusätzlichen Aufnahmen habe ich in einem separaten Chunk berechnet und anschließend mit dem Hauptobjekt ausgerichtet und verbunden. Das Vorgehen so einer Zusammenführung beschreibe ich in unserem Grundlagentraining im Detail.
Erstellen des 3D Modells
Mit dieser kombinierten Punktwolke habe ich nun genügen Details um das Objekt zu erstellen. Dabei werden die Punkte im Prinzip miteinander wild verbunden und es ergibt sich eine Oberfläche.
Wer auch hier genaueres zu den Einstellungen wissen will, das erkläre ich im Grundlagentraining
Vermessung des Modells

Die Vermessung unter Wasser wieder Zeit kostet und ist aufwändig. Zudem besteht natürlich auch die Gefahr Sediment aufzuwirbeln und dadurch die Aufnahmesituation zu verschlechtern. Um diese Gefahr zu reduzieren und die Zeit effizient zu nutzen, wurden bei den Aufnahmen bereits Referenzstäbe ausgelegt. Diese sind genau 1m lang und in dem Modell eindeutig erkennbar. Der Vorteil ist, dass ich nun das gesamte 3D Modell auf diesen Meter skalieren kann. Sobald also die richtige Größe eingestellt ist, kann ich jegliche Abstände nachmessen und einen detaillierten Plan erzeugen, ohne dass man dies unter Wasser machen muss. Ich setze also am Anfang und Ende des Referenzstabs einen Punkt und definiere diesen als 1m. Nun kann ich das Gesamte System auf locale Koordinaten stellen und bspw. die Länge und Breite sowie jeglichen Abstand im Modell nachmessen. Je mehr Referenz-Maßbalken genutzt werden, desto genauer kann man den Durchschnitt erzeugen und die Fehlerquote reduzieren.

Vorgehen und Einstellungen in Metashape:
- im Modell die Referenz ausfindig machen und manuell mit Rechtsklick eine Markierung setzten am Anfang und am Ende
- Nun in der Referenz-Ansicht die beiden Punkte markieren und per Rechtsklick einen Maßstabsbalken erzeugen
- den neu erstellten Maßstabsbalken manuell auf 1m stellen
- Sollte das modell nun noch nicht korrekt sein, in den Einstellungen der Referenzansicht auf “lokale Koordinaten” umstellen.
- Nun kannst du mit dem Maßband-Werkzeug frei die Abstände am Modell vermessen
Wenn du mehr über die Grundlagen der Photogrammetrie, die Herausforderungen und verschiedene Lösungstechniken erfahren wollt, dann empfehle ich dir unser Videotraining zu den Grundlagen der Photogrammetrie und Metashape. Hier lernst du das grundlegende Verständnis was jeden 3D Scan verbessern wird!
Videotraining: "Grundlagen der Photogrammetrie und Metashape" kaufen
Textur erstellen mit optimierter Qualität
Da ich nun ein veritables Modell vom Schiff erzeugen konnte, kann ich den ganzen Prozess weiter optimieren. Um die Texturqualität noch weiter zu erhöhen, sind Masken immer sinnvoll. Damit die bestehenden Fotos effektiver verarbeitte werden können, möchte ich unwesentliche Elemente entfernen. Man nennt das maskieren und ist bei statischen Studioaufnahmen ein hoher Qualitätsfaktor. Da ich aber keinen statischen Hintergrund habe, wähle ich die Methode „Masken aus Model importieren“. Dadurch wird das Model die Grundlage und jedes Bild wird soweit ausmaskiert für Punkte die nicht das Modell betreffen.
Defocus Masks
Gerade bei Unterwasseraufnahmen wo sich die Schärfe in der Tiefe schnell verliert ist es schön, wenn man bei der Berechnung der Textur auch nur die guten und scharfen Punkte nimmt. Dafür muss die Maskierung auf diese wenigen Punkte optimiert werden. Agisoft Metashape Pro bietet dafür das Werkzeug „Defocus Masking“ eingeführt. Sobald das Mesh/Modell erstellt ist, kann jedes Bild rückwirkend mit einer Maske ausgestattet werden. Bei der Definition der Maske sollten dadurch verschwommene Punkte entfernt werden und scharfe Punkte eine höhere Bedeutung erhalten.
ACHTUNG: Das Tool funktioniert nur, wenn man eine saubere Skalierung gemacht hat und eine kalibrierte Kamera nutzt.
- Wähle „Masken erzeugen“ aus dem Werkzeuge Sub-Menu unter Mesh
- Wähle die geeigneten Parameter bei
- „enable Mask defocus areas”
- Definite den Blur-Schwellenwert (ausprobieren, meist ist 2-3 gut geeignet) Nun können wir die Textur erzeugen und das Modell exportieren.